











Симулятор динамических мишеней
Симулятор динамических мишеней предназначен для моделирования в оптическом диапазоне динамических мишеней двух и более переменных интенсивностей, мишеней переменного углового размера и спектра, отображаемых на сверх однородном фоне. Этот симулятор используется для моделирования космических и воздушных целей в системах наблюдения за этими целями.




Общая информация
Симулятор динамических мишеней SIMAT является модульным проектором изображения, который способен моделировать в оптическом диапазоне динамические мишени двух или более переменных интенсивностей, с переменным угловым размером, переменным спектром на сверх однородном фоне. Симулятор используется для моделирования динамических космических или воздушных целей (астрономические объекты, самолеты, вертолеты и т.д.) для датчиков изображений, используемых в системах наблюдения за этими целями.
Установка SIMAT в базовой версии включает возможность моделирования в инфракрасном диапазоне, но при модернизации системы установка способна моделировать как в ИК так и в УФ / видимом диапазонах. Широкое поле зрения до 120 градусов достигается за счет использования стола с прецизионным шаговым двигателем, который перемещает его во время тестирования. Система полностью компьютеризирована и способна моделировать сложные сценарии (траектория мишени, угловые размеры, скорость, интенсивность излучения).
Принцип работы
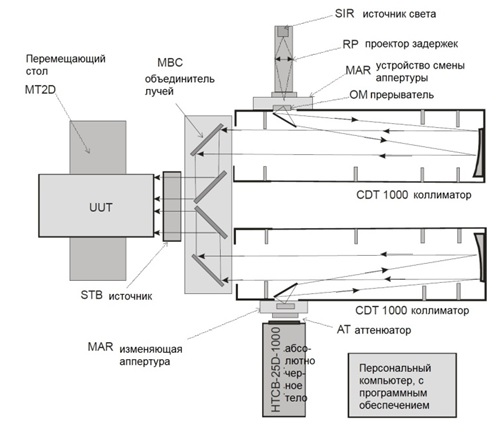
Принцип работы симулятора динамических мишеней SIMAT основан на комбинированной работе двух различных проекторов изображения, которые способны моделировать мишени с высокой температурой и маленького размера с использованием большого полупрозрачного источника ИК для моделирования переменного фона температур. Изображения, полученные с помощью двух проекторов мишени (первичная мишень и вторичная мишень (мишени)), накладываются на размытое изображение полупрозрачного источника, имитирующего фон с использованием объединителя пучка расположенного на входе тестируемой системы.
Объединитель лучей также используется для изменения относительного углового положения обеих целей и моделирования динамического движения мишени вдоль плановой траектории в тестируемой области датчика зрения.
Два внеосевых отражающих коллиматора с ИК источником, расположенным на их фокальных плоскостях, используются в качестве целевых проекторов. Моделирование изменяемого расстояния испытания датчика относительно мишени осуществляется непрерывным изменением углового размера первичной и вторичной мишени. Регулирование инфракрасного излучения, испускаемого мишенями, осуществляется за счет контроля температуры, испускаемой ИК источником или с использованием аттенюаторов нейтрального спектра.
Расстояние моделирования для мишеней осуществляется с непрерывным регулированием шага углового размера мишеней. Мишени перемещаются с высокой точностью на запрограммированных траекториях в относительно узком поле зрения (ниже 8 º), для имитации реальных правдивых сценариев. Однако, когда тестируемый датчик жестко закреплен на перемещаемом столе и вращается, тогда достигается гораздо более широкое поле моделирования (до 120 º).
Основные особенности
|
Функция |
Описание |
|
Моделируемый сценарий |
Две динамичные мишени малых размеров, переменной интенсивности, переменного размера на квази однородном переменном температурном фоне. ПК контролирует траекторию. Другие мишени не регулируемого размера. |
|
Поле зрения |
Проектируемое круговое 7º изображение с угловым 5ºx5º размером. При вращении тестируемого оборудования, закрепленного на столе MD2D, моделируемое поле зрения может быть увеличено до 120 º (для круглых изображений). |
|
Спектральный диапазон |
от 1 до 5.5 мкм (может быть расширен для УФ, видимого, ИК источника) |
|
Фон моделирования |
Переменной температуры полупрозрачного черного тела. |
|
Метод создания изображения из двух независимых мишеней |
Объединение образов двух мишеней генерируемых двух внеосевых отражающих коллиматоров с использованием оборудования объединения двух лучей |
|
Метод моделирования расстояния |
Плавная регулировка углового размера мишеней с использованием электронного управлением размера отверстия. Упрощенные версии: пошаговое регулирование. |
|
Угловой метод моделирования движения |
регулирование углового положения зеркала в объединителе лучей |
|
Регулирование излучения, испускаемого мишенью |
Регулирование температуры черных тел / источников ИК и с использованием аттенюаторов нейтрального спектра |
|
Управление с ПК |
Расстояние до мишеней (угловой размер мишени), угловое положение мишени, излучение мишени (регулировка температуры) |
Применение:
- Научные проекты, где требуется моделирование динамических задач переменного оптического спектра;
- Тестирование автоматической системы распознавания цели для наблюдения за астрономическими объектами;
- Тестирование чувствительности и системы с «интеллектуальным» распознаванием на изображение или не изображение;
- Тестирование алгоритмов для распознавания мишеней в современных системах полуавтоматического наблюдения.
Технические характеристики:
|
Параметры |
Значение |
|
Объект испытаний |
|
|
Спектральный диапазон |
от 1 до 5.5 мкм (опционально: любой диапазон в пределах от 0,3 до 15 мкм) |
|
Максимальный размер диафрагмы датчика |
круговой не более 80 мм |
|
Поле зрения |
не более7 º (круговое) или не более 5ºx5º (квадратное) |
|
разрешение |
не хуже 0,2 мрад |
|
Первичный симулятор мишени |
|
|
Число |
Один |
|
Форма цели |
Ромб(опционально: треугольник) |
|
Размер цели |
Непрерывно регулируемый размер от 0,2 до 10 мрад (опционально: до 40 мрад) |
|
Скорость регулирования размера мишени |
до 10 мрад / сек |
|
Источник излучения |
набор из двух сменных источников ИК-излучения: HTCB-1000 черного тела и IR 2300 электрической инфракрасной лампы |
|
Аттенюатор |
Набор из пяти заменяемых вручную фильтров |
|
Диапазон затухания |
1:1000 (в пять шагов) |
|
Угловое положение |
а) регулирование положения зеркала в MBC объединителе луча - регулирования в узком поле зрения не более 7º б) регулирование углового положения датчика, закрепленного на столе MT2D - регулирование в широком поле зрения не более 120º |
|
Скорость регулирования углового положения |
а) до 10º / сек с использованием МВС объединителя луча б) до 100º / сек, используя стол MT2D |
|
Вторичный симулятор мишени |
|
|
Число |
Один (опционально серия до пяти малых объектов постоянной формы) |
|
Форма мишени |
ромб |
|
Размер мишени |
непрерывно регулируемого размера от 0,2 до 10 мрад (малые, не регулируемого размера, при моделировании нескольких мишеней |
| Скорость регулирования целевой размер | до 10 мрад / сек |
| Источник излучения | набор из трех сменных источников ИК-излучения: HTCB-1200 черного тела, двух электрических инфракрасных ламп: IR2300, IR3000. Излучение из этих источников могут быть смодулированы с использованием прерывателя ОМ-2. Опционально поставляется набор ИК лазерных диодов / ИК-светодиодов. |
| Аттенюатор | Набор из пяти заменяемых вручную фильтров |
| Диапазон затухания | Не менее 1:1000 (в пять шагов) - спектрального диапазона: от 1,1 до 5,5 мкм |
| Угловое положение |
а) регулирование положения зеркала в MBC объединителе луча - регулирования в узком поле зрения не более 7º б) регулирование углового положения датчика, закрепленного на столе MT2D - регулирование в широком поле зрения не более 120º |
| Скорость регулирования углового положения |
а) до 10º / сек с использованием МВС объединителя луча б) до 100º / сек, используя стол MT2D |
| Фон | |
| Источник излучения | STB инфракрасный источник |
| Тип | Полупрозрачный серый корпус |
| Зона облучения | 100х100 мм |
| Эффективная дальность регулирование температуры | От температуры окружающей среды до не менее 100ºС |




{kind=link}